【飞行器】基于倾转结构垂直起降飞行器的设计与研究
摘要
垂直起降飞行器是近些年来发展非常迅速的一类新型航空器,兼具有固定翼飞行器高速和远距离飞行的能力,以及垂直起降飞行的能力。无人机造价低廉、使用以及维护较为方便、无驾驶员生命危险等优点正符合了现在新型垂直起降飞行器的研制和使用要求,所以新型垂直起降无人飞行器成为了一个重要的发展方向。
现如今垂直起降飞行器已经出现了一些验证性产品,但各类产品均有其的不足之处,目前还没有出现一款足够优秀的垂直起降无人飞行器方案。比如传统的4+1垂直起降飞行器方案,在垂直起降时四个向上的电机工作,水平飞行时则让向后的电机工作,其余电机停转,这就导致各个电机的利用率较低,且水平飞行时不工作的四个电机也成为了飞行器的负担。本课题采用三旋翼和固定翼的复合式布局,高速平飞模式利用固定翼成熟可靠的技术,垂直起降模式则在三轴飞行器的基础上设计了电机矢量倾转控制程序,使得飞行器可以更灵敏地调节姿态。本课题还设计使用了电机座倾转结构,使得整架飞行器只需使用三个电机,且每个电机都可以在垂直起降模式以及水平飞行模式下工作,这样的无冗余电机设计不仅减轻了飞行器的重量,还降低了飞行阻力,提高飞行效率。
本课题历时17个月,主要进行了两部分研究:一、研究并设计制作完成了飞行器以及电机倾转结构,实现了飞行器电机的前拉模式与三轴垂直起降模式的相互转换;二、利用pixhawk开源飞控,实现了通过倾转三个电机座,使飞行器完成了由垂直起飞模式与平飞模式、平飞模式与垂直降落模式之间的平稳转换。完成2架样机的制作以及试飞,完美实现预期目标。
本项目将固定翼飞行器与三轴飞行器完美结合,在效率尽量高的基础上,大大减少了飞行器的使用限制。技术成熟后,可以广泛运用于军用侦查、作战、运输;民用测绘、航拍等领域,为人类产生极大的便利,有着极其广阔的应用前景。
Vertical Takeoff and Landing Aircraft (VTOL) is a new type of aircraft that has been developing rapidly in recent years. It has the ability to fly at high speeds and long distances, as well as the ability to takeoff and landing vertically. Low cost, convenience of maintaining and less danger to the operator are the representative advantages of unmanned aerial vehicle(UAV), which match the requirement of new VTOL UAV’s research and use. Therefore, the new type of VTOL UAV has become an important development direction.
Nowadays, some testing VTOL UAV products come into use in the world, but there is no perfect one without any shortcomings. For example, the conventional 4+1 hybrid UAV, which uses 4 upward motors during the vertical flight, and only use 1 forward motor during the horizontal flight, causes low motor utilization rate and the burden from other 4 redundant motors during the horizontal flight. This study uses composite type of three rotors aircraft and the fixed wing aircraft: for the horizontal flight, it uses the developed and reliable technology of the fixed wing aircraft; for the vertical flight, I designed vector-tilting-control-program of the motors on the basis of the conventional three rotors aircraft, which makes the UAV more sensitive. I also designed the motor-seat-tilting-structure, which allows the UAV to use only 3 motors to act on the UAV at each condition. Those non-redundant-motor designs help not only reduce the weight of the UAV, but also decrease the resistance and increase the efficiency of it.
This study lasts 17 months, mainly includes two parts: firstly, the designing and making of the UAV and the tilting structure, that lets the UAV achieve the goal of switching between horizontal flying mode and the VTOL mode; secondly, with the help of Pixhawk Autopilot, the UAV switches from Vertical Takeoff to Level Flight, and Level Flight to Vertical Landing smoothly by tilting three motors. On this basis, 2 testing UAV have been tested, which perfectly achieve the desired goal.
This study combines the fixed wing aircraft with the three rotors aircraft perfectly. On the premise of as high efficiency as possible, it reduces the using limitation of UAV greatly. After the technology matures, this VTOL UAV can be used in many fields with a bright future.
引言
普通的固定翼飞机速度快、载重大且续航时间长,在飞行时几乎不受地形的限制,但是在起降时会受到诸多地形因素的影响,对起降场地要求较高。而直升机、多轴飞行器飞行稳定且灵活,只需要很小的一块平地就可以完成起降,但目前此类可垂直起降的飞行器有速度慢、续航时间短的缺点。在航空运输等方面,如果能使固定翼布局的飞行器做到垂直起降,然后在空中再切换为固定翼平飞模式飞行,则可以大大减少飞行器的使用限制,降低其对于场地的要求。
本课题以将固定翼布局飞机与多轴飞行器相结合的思路为基础,对各个垂直起降方案进行筛选,提出了使固定翼布局飞机垂直起降,并在空中切换为固定翼模式飞行的方案,并通过改装样机,调试参数、试飞测试等工作验证了此方法的可行性。
方案设计
设计思路
经过研究,当下垂直起降飞行器基本有两种:一是像鹞式、F-35战斗机的矢量喷口,这种结构制作难度大且不稳定,不是最佳方案;二是将整架飞机垂直竖立在地面上,可以做到垂直起飞,但不能垂直降落,因此,这种方法也不是最佳方案。
经过研究筛选,可行方案有以下三个:
- 多轴布局,以多轴方式起降,在空中通过改变姿态将螺旋桨向前。
- 固定翼布局,通过吊机起降。
- 固定翼布局,通过倾转使螺旋桨在起降时向上,多轴姿态起降,然后在空中将螺旋桨倾转至向前,固定翼姿态飞行。
考虑技术难度和操控难度,我选择了方案3的倾转结构。为了提高飞行效率,我采用将三轴与固定翼结合在一起的方案。
倾转结构初步方案有以下几种:
- 电机与机翼固定,机翼为两截,通过倾转部分机翼达到改变螺旋桨朝向效果。
优:结构相对较为简单。
劣:机翼结构遭到破坏;重心问题严重。
机翼固定,电机安装在一个可以倾转的电机座上,倾转电机座以达到改变螺旋桨朝向的效果。
优:不会对飞机本身结构产生破坏。
劣:设计复杂。
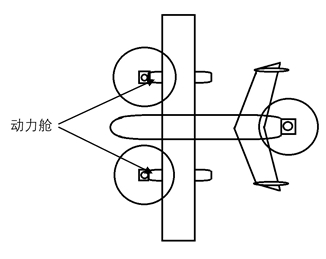
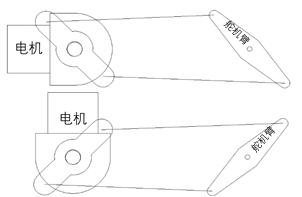
权衡了以上两种设计的利弊后,设计使用强度更好的电机座倾转结构,如图1所示。飞机为固定翼布局,机翼处有两个倾转电机,第三个在机尾后,三个电机都可以从向前到向上进行倾转,尾电机在可以上下倾转的同时还需要像三轴尾电机一样可以左右偏移一定角度,来达到控制飞机姿态的效果。
此方案还存在以下4个缺点:
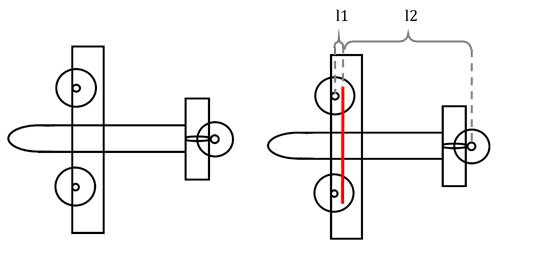
- 固定翼飞机的重心需在机翼前部的1/3~1/2处(图2红线位置),三轴模式起飞时,前部两个倾转电机的力臂l1非常短,而尾电机的力臂l2相对非常长,导致前两个电机需要很大的扭力才能对飞机的姿态进行调整,而尾电机用很小的扭力就可以对飞机姿态产生作用,因此,飞机在飞行中就会很不稳定。
- 机翼遮挡了桨叶的大部分面积,对三轴模式起飞时的升力影响较大,效率损失较大。
- 由于是单垂直尾翼,尾电机倾转向上时会和垂直尾翼发生冲突。
- 若想以固定翼模式平飞,飞机的重心应调整到图2红线位置,但此设计由于尾电机力臂大的原因,重心可能会靠后。
对于以上缺点,改进设计如下:
- 将前倾转电机向前伸出,即延长了前两个电机的力臂,同时又减少了机翼遮挡桨叶的面积,增大了飞行效率。
- 尾电机选用小电机配小桨,使得尾电机力矩不会过大,并且减轻了尾部重量,重心更加合理。
- 尾翼布局改为双垂直尾翼,并将垂直尾翼布置在水平尾翼两端,使尾倾转电机不受遮挡。
- 由于安装了三个电机,所以在平飞模式动力充足,可以考虑在前螺旋桨下挖出大小合适的缺口,提高三轴效率。
- 经过在网上查阅相关资料,尾部电机不需要左右倾转,现有飞控固件支持通过前两个倾转电机进行矢量控制调整飞机姿态,进一步降低了飞机的复杂性,减轻了尾部重量。
改进后的设计图如图所示。
对于改进方案,最重要的是结构部分的设计和飞控的调参。结构部分主要包括机身和机翼、倾转结构、垂直尾翼和水平尾翼结构以及其他受力结构;飞控主要包括倾转电机旋转PWM值和倾转参数等。
程序设计
飞行过程中程序需要解决的问题的方案:
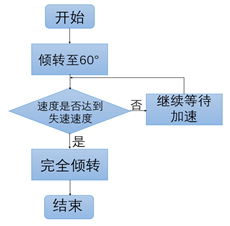
主要问题:飞行器在垂直起飞时,飞机升力的提供者为螺旋桨,而当飞行器从垂直起飞模式转换为垂直降落模式时,螺旋桨旋转至向前导致不能继续提供升力,而由于飞行器的水平速度还没有达到失速速度,机翼提供的升力也不足托起飞机,从而导致在切换飞行模式时会严重掉高度,非常危险。
解决方案:设计了如右图所示的飞控程序,在刚刚进行切换时只进行部分倾转,通过飞控实时监测空速,待空速达到失速速度后再将倾转电机完全倾转到底。
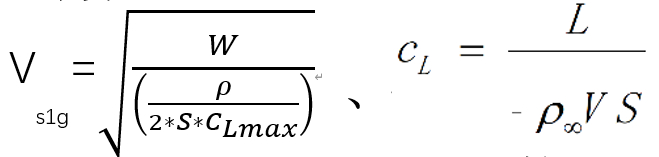
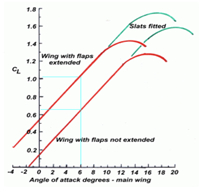
失速速度的计算:根据公式:

以及下图所示的攻角与CL的关系图,计算出失速速度大约为11m/s。
其他程序设计:
为了飞行方便,主要采用固定翼线性飞行模式与多轴自稳模式,并在其间进行切换,并添加纯手动模式以防止出现意外。
在固定翼线性飞行模式飞行时,为了防止出现意外,程序应在空速过慢(即低于失速速度)和翻滚角度过大时予以反映,即自动切换回多轴自稳模式救机。
结构设计
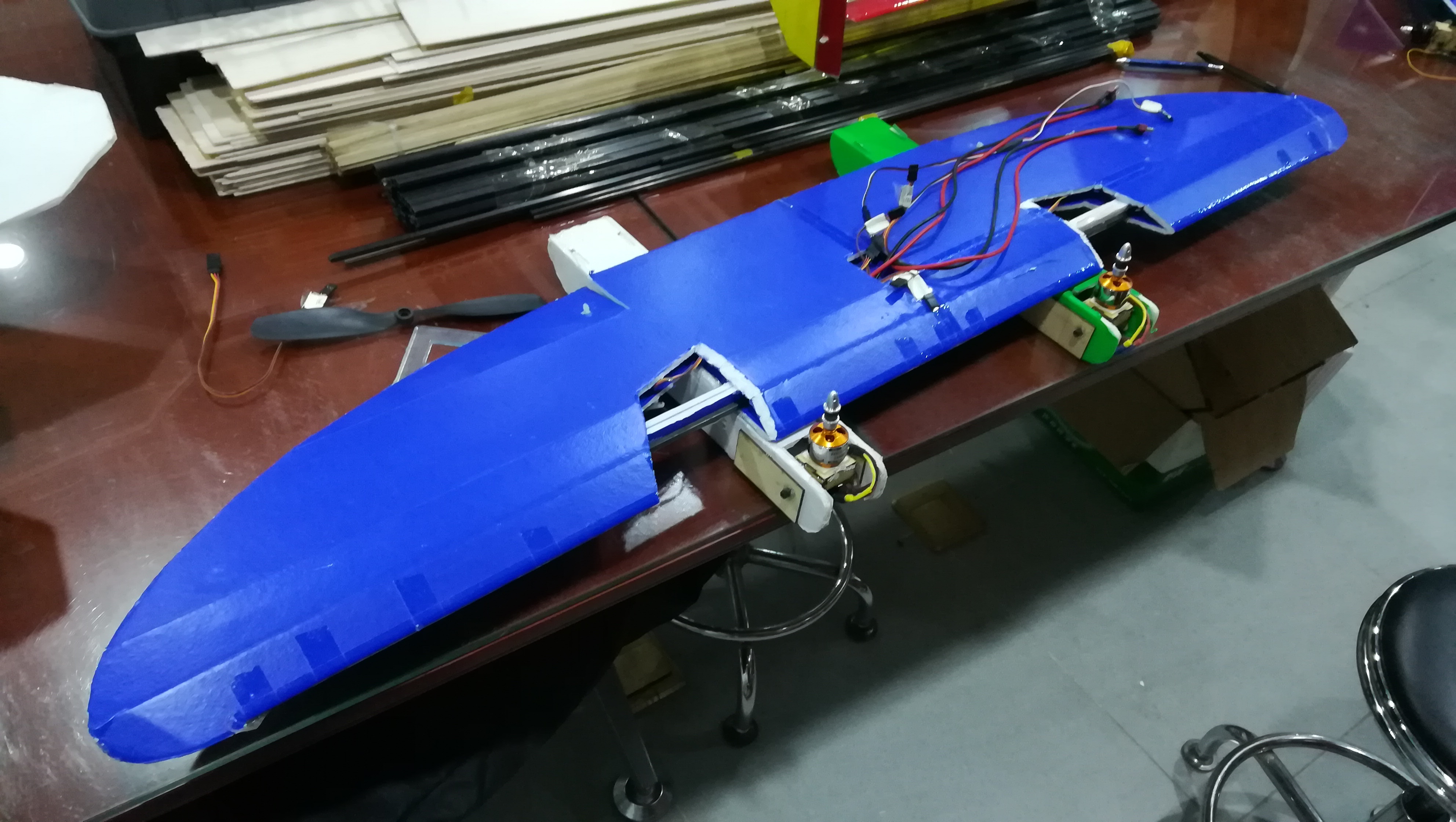
根据图3方案草图的结构,设计此飞机材质为KT板,两侧机翼下挂有动力舱,电机安装在动力舱前方,动力舱内直接安装倾转结构;尾翼是双垂尾布局,两个垂直尾翼在水平尾翼两端。
电机倾转结构设计
结构需要:倾转电机需要做到向前到向上90度方向,同时前倾转电机为了进行矢量控制还需要再向后多倾转10度,即向前至向上100度。而且由于矢量控制的要求,倾转结构要与舵机转动同步且灵敏。
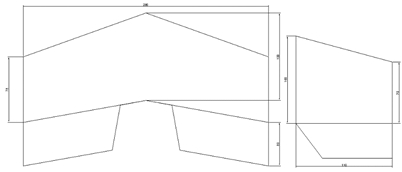
方案设计:根据舵机只有120°左右的可旋转角度,设计图如图6所示:在电机座两侧安装与舵机臂长度相仿的倾转臂,通过铁丝连接舵机臂,前电机座采用6mm碳杆固定在动力舱上;由于飞机材料为KT板,在动力舱两侧碳杆穿过处安装木板以提高强度;舵机的转动角度大于100度,矢量控制的余量可以解决。
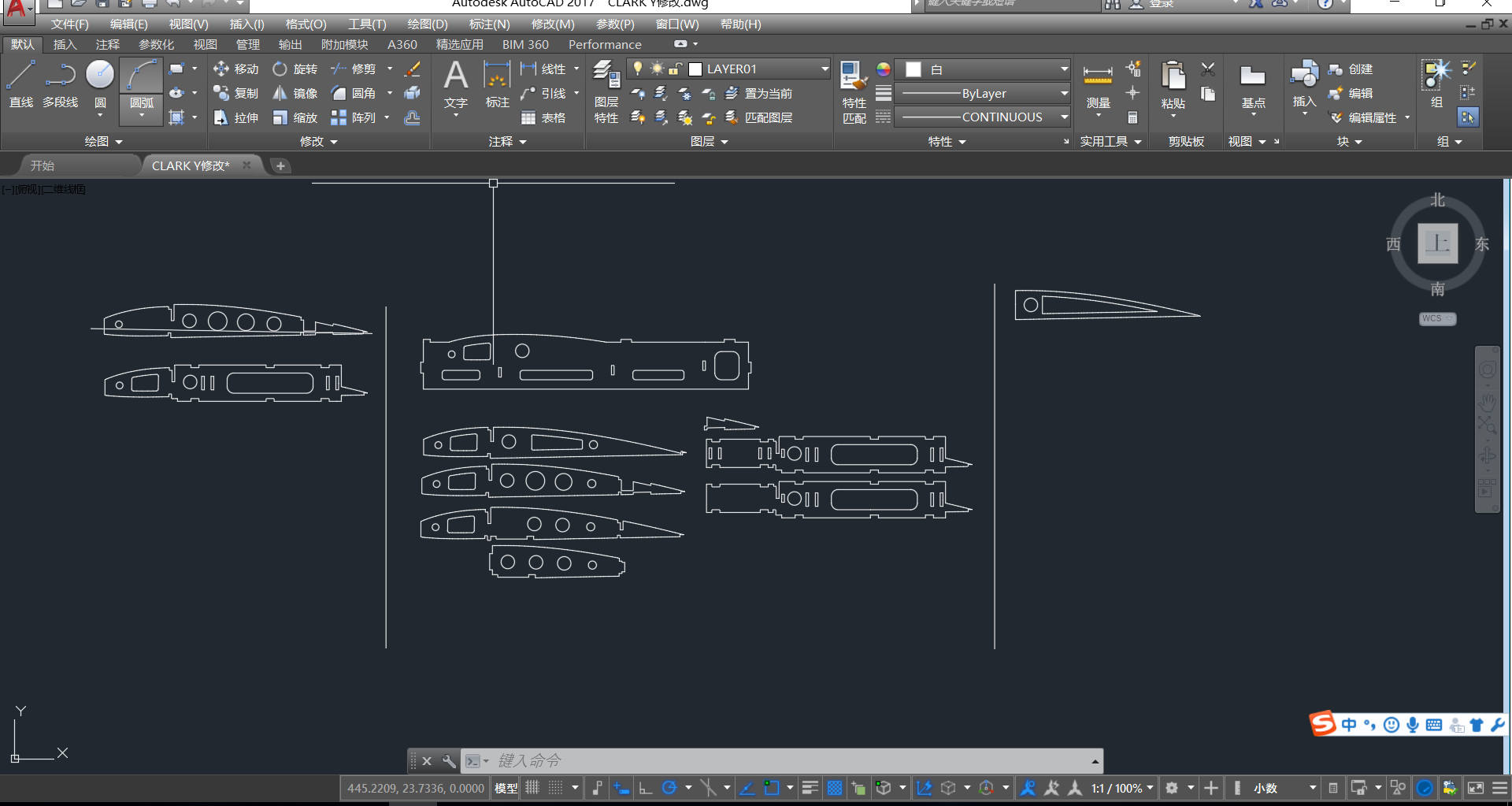
倾转结构激光切割图纸设计
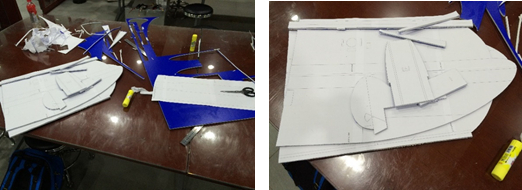
为了满足所需的强度和刚度,我选择用2mm层板制作倾转结构,并用激光切割机进行加工,采用榫卯结构拼接并用502胶水以及AB胶粘合。根据SOLIDWORKS的建模,首先采用AutoCAD2017进行画图,检查无误后使用激光机进行切割。
尾翼设计
考虑气动因素,水平尾翼和垂直尾翼面积需要稍大一些。由于气动问题较复杂,具体设计根据实际情况调整。
硬件选择
电机、电调以及螺旋桨
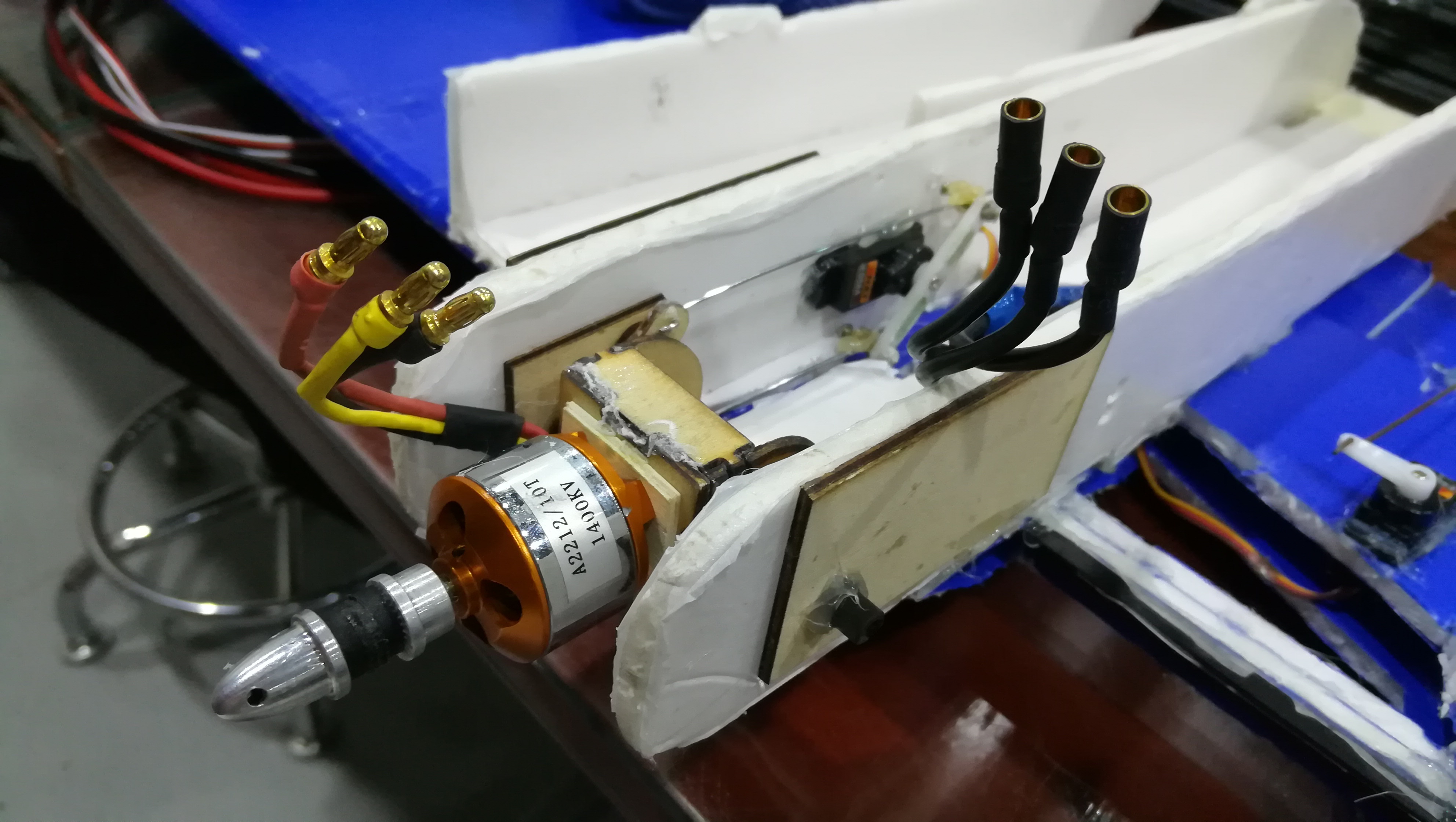
根据前面的设计,尾电机选择较小的电机。经过计算,前两个倾转电机使用新西达A2212 KV1400型外转子无刷电机,选用30A电调;尾电机选用c2204 kv2300型外转子无刷电机,选用20A电调。由于飞机使用三轴模式起飞,需要其中一个电机配反桨反转。所以考虑左前方电机逆时针转,右前方电机顺时针转;尾电机顺时针转。
飞控
由于功能原因与固件的限制,选用Pixhawk飞控,配套插件有GPS、安全开关、空速计以及电流计。
氧空气、接收机
选用16通道睿思凯X9D遥控器以及配套X8R接收机,此接收机有SBUS口可以直接与Pixhawk飞控连接,非常方便。
实验验证
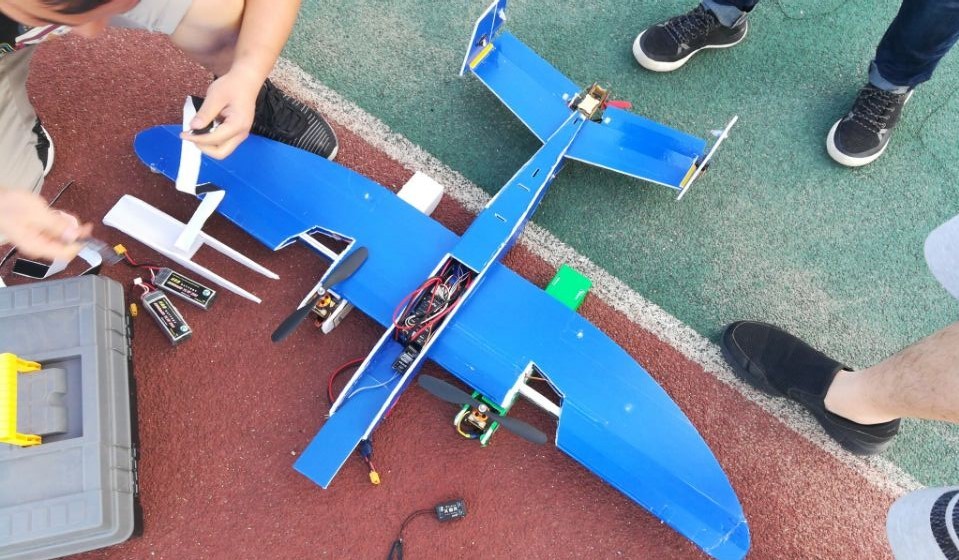
制作并改装样机
按照图3的设计图设计飞行器,打印图纸并将其粘在KT板上,使用美工刀进行切割。切割时需将刀片与KT板垂直,并定时更换刀片,以保证切割质量。
制作样机机翼
由于前倾转结构是安装在动力舱内,而动力舱挂在机翼下方,所以首先根据图纸制作机翼,为了增加强度,在其中间位置加装一根5mm的正方形碳杆,并用热熔胶粘合。粘合完成后,在两侧动力舱位置外侧各选取约50cm²的区域,使用美工刀切割出缺口,切割时注意避开机翼主梁以及碳杆,尽量减少对结构强度的损失。
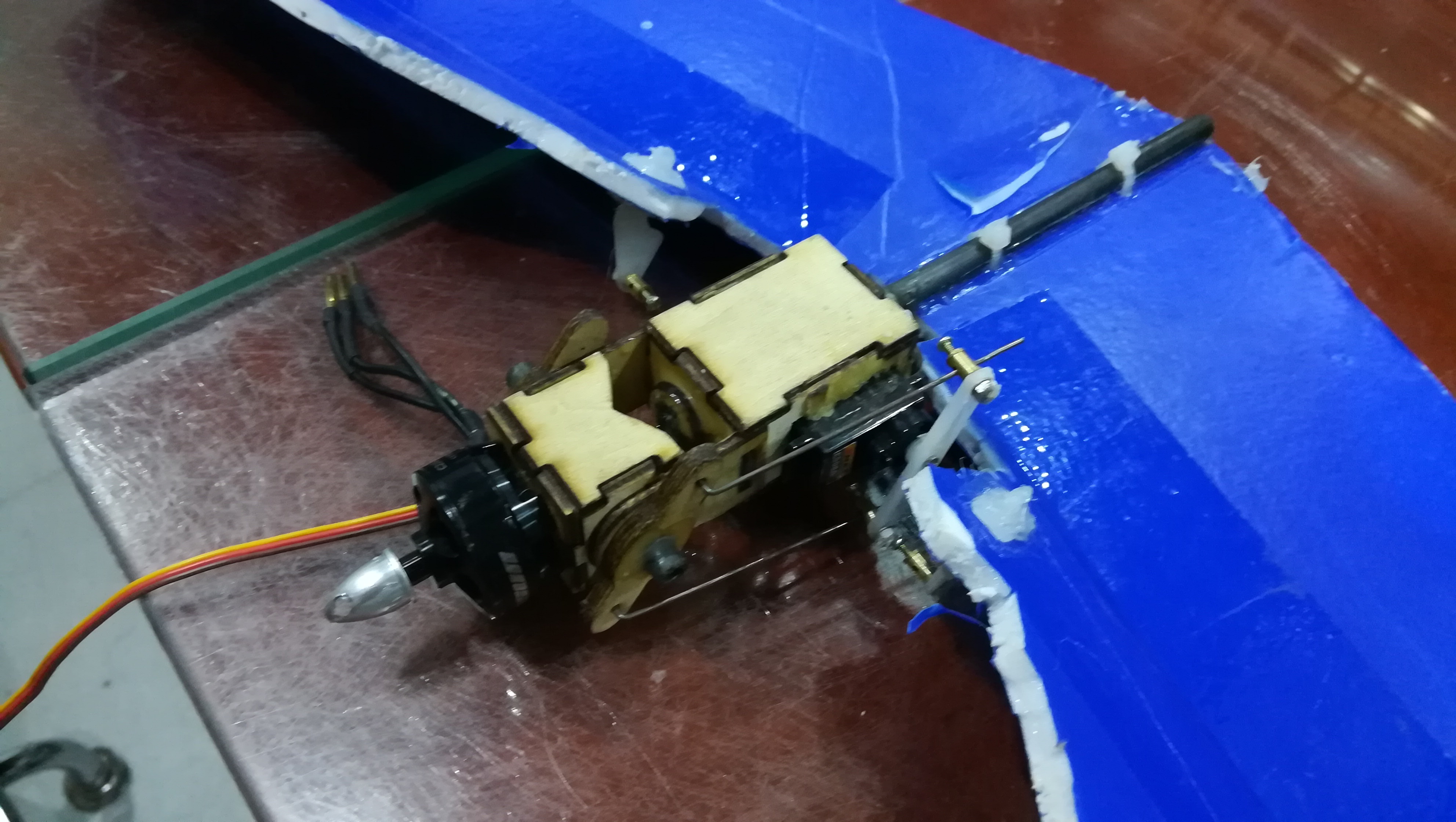
制作动力舱倾转结构
- 根据设计的AutoCAD图纸,利用数控激光切割机对2mm层板进行切割,进行组装
- 在主结构两侧垫上一片2mm垫片后,粘合倾转结构力臂,并在力臂两侧打孔以便舵机铁丝穿过。
- 截取合适长度的6mm碳杆固定倾转结构并粘合。使用舵机调节器确定舵机中位,由于前倾转电机需要完成100度的倾转,所以舵机中位时倾转结构应为向上50度。
- 确定无误后,使用铁丝连接舵机臂与倾转结构,在舵机臂上安装快调以便以后的调节,用热熔胶枪固定舵机,使用魔术贴将30A电调固定在动力舱中。
按照以上步骤组装完成两个动力舱,连接好舵机延长线以及电源延长线后将两个成品动力舱插在机翼下方的卡槽中并做检查,调整至结构以及延长线长度均适宜后,拆开待整机组装时使用。
制作位移及尾部倾转结构
根据飞机尾容量的计算,以及尾部倾转电机的安装需要,水平尾翼和垂直尾翼的设计见图16,在考虑了强度和重心问题后,决定使用单层KT板制作,倾转部分组装方法与动力舱倾转结构类似。
由于水平尾翼和垂直尾翼全部为单层KT板,若单纯地直接用热熔胶粘合水平尾翼和垂直尾翼,结构强度可能不足,所以在进行粘合时,在两块尾翼KT板的夹角处又补充一根长条状KT板,以加强结构强度。
进行整体组装
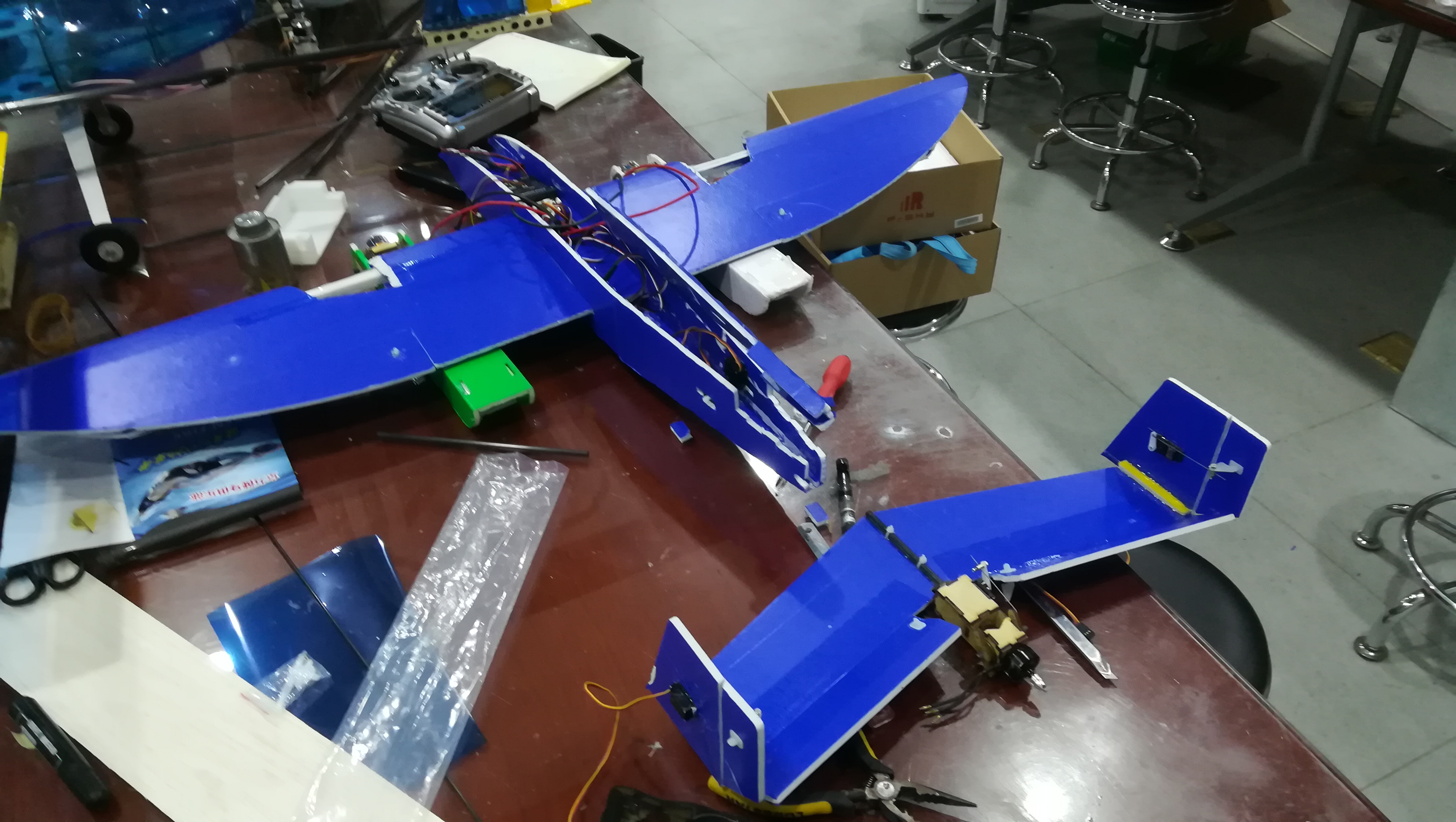
组装机身、机翼及其相关装置
将机身部分使用热熔胶枪粘合,确保各部分垂直。将之前安装好的机翼上的动力舱以及延长线卸下,并确保机翼上没有任何突出物,将机翼插入机身的孔洞中,由于机身也为单层KT板结构,在插入机翼时要小心谨慎,不能使用蛮力,以免对机身或机翼造成损伤。完成后安装副翼舵机、舵角并安装动力舱,将做好标记的延长线插入正确的接口中,拉到机身里。
组装尾翼及其相关装置
组装尾翼以及尾部倾转结构并安装好方向舵舵机。由于升降舵舵面为两块,所以升降舵舵机需要一正一反粘贴在机身内。安装延长线,先将尾翼下面与机身粘合,不粘合机身顶盖以方便日后调整。
调试飞控
进行接线设计并调参
安装pixhawk飞控、电流计、GPS以及安全开关,并连接地面站Mission Planner,加载开源固件。
Pixhawk飞控共有15个传输接口,分别为MAIN OUT1-8、AUX OUT1-6、RCIN以及SBUS接口,飞机的电子设备连接在MAIN OUT以及AUX OUT接口上。固件中控制接口的参数为SERVOn_FUNCTION=m,其中n为插口编号,从MAIN OUT 1开始,AUX OUT的编号顺延,即从9开始;m为各电子设备的编码。设计接线方式、设备编码以及参数设置见下表:
接线口 所接设备 设备编号 参数设置 MAIN OUT 1 副翼舵机 4 SERVO1_FUNCTION=4 MAIN OUT 2 升降舵舵机 19 SERVO2_FUNCTION=19 MAIN OUT 3 无 0 SERVO3_FUNCTION=0 MAIN OUT 4 方向舵舵机 21 SERVO4_FUNCTION=21 MAIN OUT 5 右前方电机(顺) 33 SERVO5_FUNCTION=33 MAIN OUT 6 左前方电机(逆) 34 SERVO6_FUNCTION=34 MAIN OUT 7 无 0 SERVO7_FUNCTION=0 MAIN OUT 8 后方电机(逆) 36 SERVO8_FUNCTION=36 AUX OUT 1 右前方倾转舵机 76 SERVO9_FUNCTION=76 AUX OUT 2 左前方倾转舵机 75 SERVO10_FUNCTION=75 AUX OUT 3 后方倾转舵机 45 SERVO11_FUNCTION=45 AUX OUT 4 无 0 SERVO12_FUNCTION=0 AUX OUT 5 无 0 SERVO13_FUNCTION=0 AUX OUT 6 无 0 SERVO14_FUNCTION=0 按照上表的设计,在pixhawk飞控固件的参数列表中更改接口参数,然后根据各个延长线上的标志,将飞机电子设备与飞控连接。
校准遥控器并设置飞行模式以及切换开关
将X8R接收机上的SBUS接口连在pixhawk飞控的RCIN接口上,并校准遥控器:将各个需要使用的通道从最大拨到最小,确认无误后点击确定校准完成。设计改变飞行模式是在第五通道的三段开关,所以改变参数FLTMODE_CH=15。进入“飞行模式”页面,拨动三段开关,观察飞行模式的转变情况,将三段开关上位设置为QSTABILIZE模式,即多轴自稳模式;中位设置为FBWA模式,即飞机线性飞行模式;下位设置为Manual模式,即手动模式,直接输出信号。设置完成后,扳动开关检查,保证切换正确。
调整倾转舵机倾转角度PWM值参数
首先启用向量推力,即:
Q_TILT_TYPE=2
设置飞机多轴模式布局为三轴,即:
Q_FRAME_CLASS=7
为了防止在调参过程中由于PWM值不合适导致舵机长时间卡在死位烧坏,先调节三个倾转舵机中一个的最大和最小倾转角度PWM值,并在调试过程中拔掉其余两个舵机的信号线。根据实际切换飞行模式时各个舵机的倾转角度调节参数SERVOn_MAX与SERVOn_MIN,调节在n接口处倾转舵机的倾转最大值与最小值,并使用参数SERVOn_REV=0or1调节在n接口舵机的正反向,调整完成并检查无误。
调整其他参数
设置倾转舵机倾转为固定翼时的转速为每秒40°,即:
Q_TILT_RATE_DN=40
设置倾转舵机倾转为多轴模式时的转速为每秒35°,即:
Q_TILT_RATE_UP=35
设置两个动力舱倾转电机的矢量控制角度,即在控制飞机姿态时允许后倾的角度,根据计算,7°就可以控制,但是10°可以抵抗强风,所以将其设为10°,即:
Q_TILT_YAW_ANGLE=10
为了防止空中由于突然从多轴模式切换为固定翼模式,拉力消失而由于速度不够升力过小导致掉高度,所以要设置一个切换固定翼模式后等待空速的角度以及空速,设计在倾转60°时等待空速,即:
Q_TILT_MAX=60
根据飞机的机翼升力提供,设计在空速达到10m/s时,判定飞机已经超过失速速度,将倾转舵机倾转到底;并且若在固定翼模式速度低于这个值,则多轴会自动出现来救机(手动模式不受限制),即:
Q_ASSIST_SPEED=10
为了安全考虑,不仅空速要实时监测,固定翼模式时的倾斜角度也要监测。设计当飞机为固定翼模式时,若倾斜角度达到45°则多轴也自动出现救机(手动模式不受限制)。即:
Q_ASSIST_ANGLE=45
在地面站中校准罗盘、加速度、指南针以及电调
在Mission Planner中按照教程步骤校准罗盘、加速度以及指南针。
电调的校准则麻烦一些:首先将pixhawk连接电脑与遥控器接收机,调节参数Q_ESC_CAL=1,在QStabalize模式解锁飞机,将遥控器油门推到最高。然后插上电池,在听到高位确认音后将油门收到最低,听到低位确认音后拔出电池,并重新开启飞控,校准完成。
发现问题并改进
在全部设置完成后,检查各个舵机倾转情况:首先在手动模式下检查副翼舵、升降舵以及方向舵舵机正反情况,如果舵面为反向,则在遥控器通道控制中调节。完成手动模式的调节后,再调节多轴自稳模式以及固定翼模式的舵机情况,由于二者均有自稳功能,所以还需要将飞机角度改变检查各个舵面的修正情况。在多轴自稳模式中还要进行矢量控制的检查,向一个方向打方向舵,两个动力舱倾转舵机中此方向的舵机应向后多倾转10°,另一个则向前10°以进行矢量控制。在这两个模式中,若任何舵机为反向,则修改参数SERVOn_REV=0or1(n为反向倾转的舵机的接口编号)来进行修正。
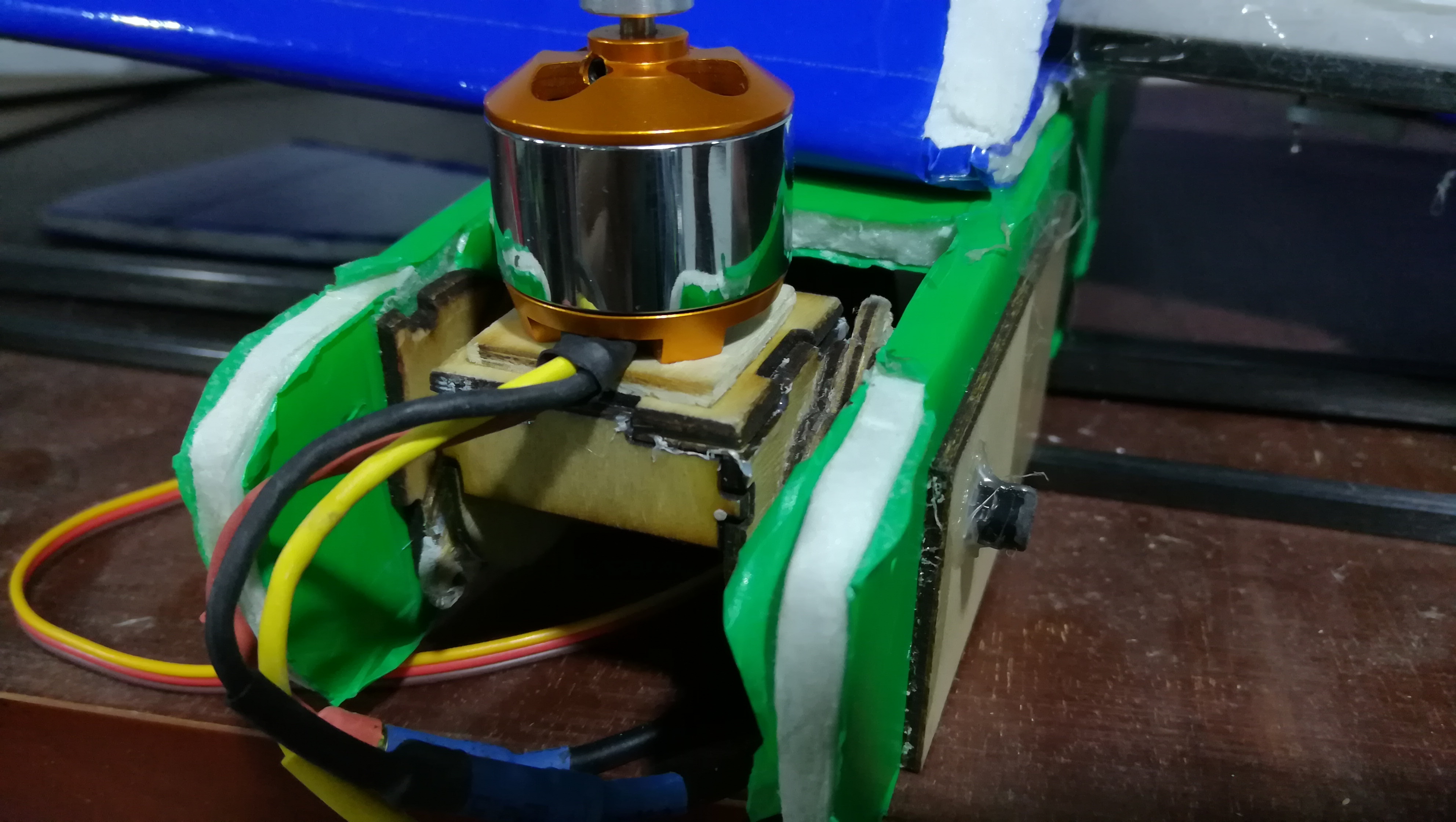
当以上工作完成后,我在不解锁时安装了螺旋桨进行舵机的最后测试,但是又发现了一个很大的问题:前侧两个动力舱倾转结构需要向后多倾转10°进行矢量控制,但是由于动力舱并未伸出机翼足够长,所以当方向舵打满时,即一个动力舱倾转舵机的矢量控制角度达到10°时,桨叶的尖端会打到机翼,非常危险。
经过思考,我在螺旋桨下方垫了3个约5mm厚的垫片,以将螺旋桨垫高。完成后,经测试螺旋桨不会打到机翼了,但是空位并不大,考虑到飞机在空中飞行时桨叶会有一定变形,也有可能会在空中打到机翼。但是受电机轴长度的限制,不能再在螺旋桨下垫更多的垫片,于是决定将电机垫高的方法来解决。首先按照电机固定螺丝的尺寸在实验室找到比原装螺丝约长3mm的螺丝,并使用3mm层板裁出与倾转结构安装电机面大小相仿的垫片,安装在倾转结构上,如图15。
经过以上调整改进,现阶段发现的主要问题基本得到解决,可以进行试飞测试。
试飞测试
试飞准备
选择开阔场地作为试飞场,本次试飞选择在北京航空航天大学昌平校区的操场进行。再次确认插线孔位是否正确。将飞控连接电脑,再进行一次遥控器各通道行程校准,检查拨动遥控器第五通道飞行模式切换是否正确。最后根据重心位置,使用魔术贴将电池粘在机头部分,调整好重心。将检查完成的航模摆放在操场中央,轻推油门检查各个电机旋转情况。分别在多轴自稳模式、固定翼自稳模式以及手动模式下检查各个舵面的转动情况以及矢量控制的倾转情况。
按照上述程序,检查无误后可以开始试飞。
多轴模式测试
首先进行多轴模式的测试,在多轴模式起飞后先在空中进行前进、后退、旋转等姿态的测试,暂时不切换固定翼模式。
现象:总体飞行情况很好,起飞后很稳定;在打方向舵旋转时归中有些不灵敏,需要往回打一下才能完全停止旋转。
分析:在多轴自稳模式打方向舵的旋转是由前面两个电机矢量控制的,初步判断是由于前面两个动力舱倾转舵机的倾转结构摩擦力大,归中时舵机不能将其完全拉回导致的,不过问题不大,不影响接下来的测试。
多轴切换固定翼模式测试
以多轴模式起飞,等待飞机平稳后拨动第五通道三段开关切换为固定翼模式,进行平飞测试,再切换回多轴模式降落。
现象:飞机切换固定翼模式时表现良好,矢量控制也表现很好,切换过程中未出现掉高度的现象。平飞模式很稳定,但是自稳太过强烈导致无法拐弯,切换为手动模式后成功转弯。最后在准备降落时由平飞模式切换回多轴模式后听到打桨的声音,航模失去控制。
分析:初步判定固定翼自稳模式自稳太过强烈导致无法转弯的原因是参数最大横滚角度设置不适合,即LIM_ROLL_CD以及最大、最小俯仰角度,LIM_PITCH_MAX和LIM_PITCH_MIN参数设置过小所导致的。
飞机降落失控原因:在平飞模式切换回多轴自稳模式后,尾倾转电机为向下倾转。这时,电机的电源线由于布置不当,绑扎不牢下垂,尾电机螺旋桨打到了电源线,导致飞机失控。
测试中发现的问题与不足
- 由于采用普通固定翼布局飞机作为样机,所以尾电机只能放在飞机机尾后,虽然尾电机采用小电机配小桨设计,解决了力臂问题,但是重心太过靠后。由于固定翼飞机重心需在机翼前1/3处,最后在配重时需将电池伸出机头较多才解决重心调节问题,这不仅不方便,还较危险。
- 三轴飞行器的重心一般在三角形重心附近,但由于采用普通固定翼布局,尾电机又在机尾后,导致三角形重心移到了机翼中后部,而飞机实际重心调到了机翼前1/3,尽管三轴模式没出现什么问题,但是可靠性不高。
- 虽然倾转结构可以完美地完成倾转,切换飞行模式时航模表现很好。但由于倾转结构为自己制作,各部件之间相对位置不是很精准,故各部件间摩擦力较大,回中不灵敏,且尾部倾转结构布线较难,这也是导致降落阶段飞机失去控制的主要原因。
- 在机翼上打的两个缺口虽然增加了多轴效率,但是降低了固定翼的升力,在拐弯时略有掉高度的现象。


改进
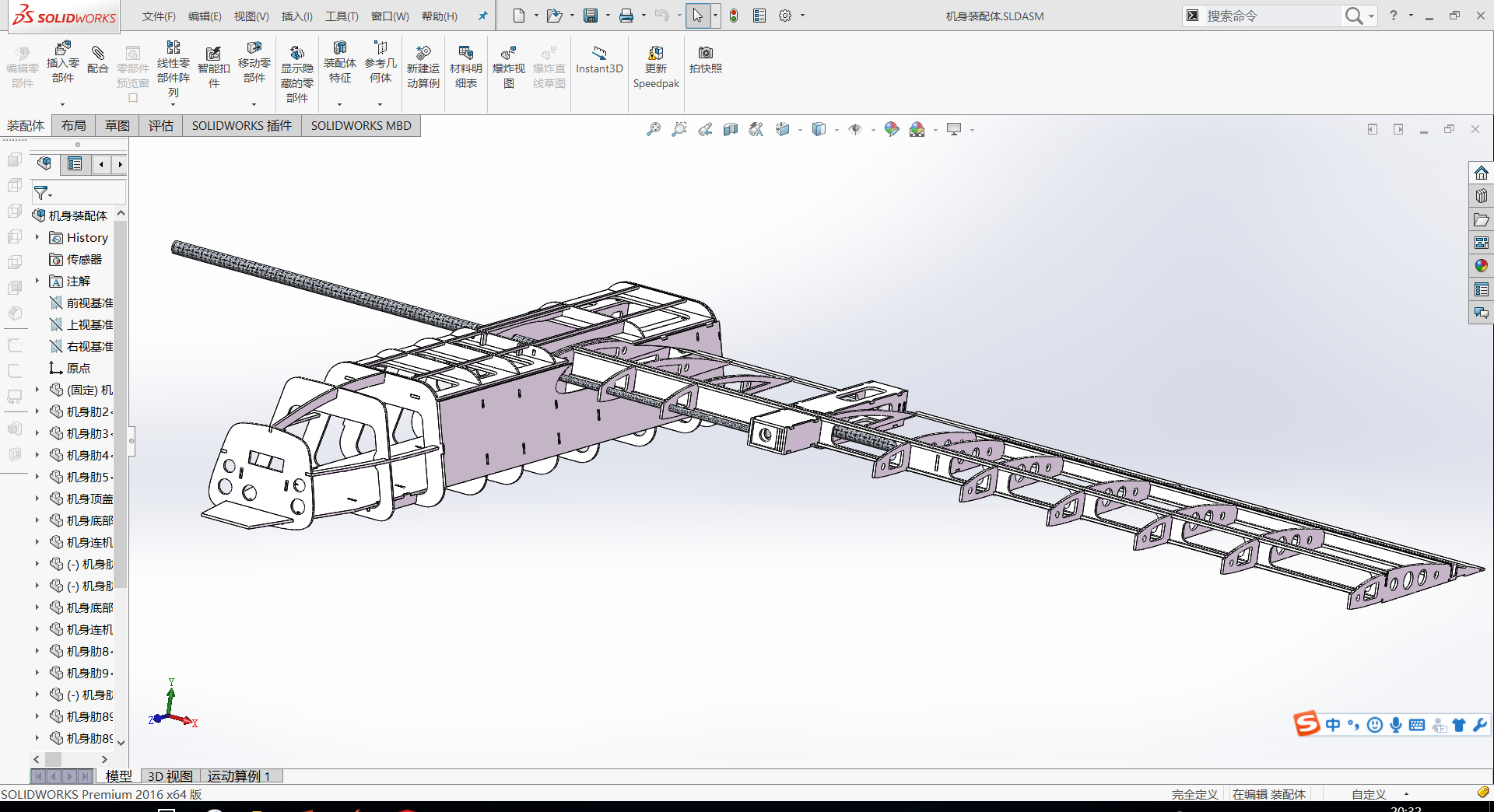
对于测试中发现的问题经过查找相关资料和咨询指导教师,若飞机使用类似RQ-7无人机的布局,如图26、图27,上述问题即可解决。
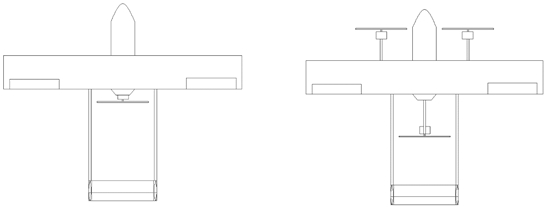
此类布局解决的问题有:
- 重心调平简单:此设计前两个倾转电机前伸较多,尾电机装在机身后,重心不会靠后太多,使用电池就可轻松调平,且基本不存在前方两个倾转电机在进行矢量控制的时候会打到机翼的情况。
- 飞行可靠性增强:前方两个倾转电机由于前伸较多,多轴模式时机翼对于螺旋桨的影响较小,不需要再在机翼上开缺口,增加了结构强度且固定翼模式时效率提高。另外,此设计三轴重心与固定翼重心基本重合(机翼前1/3处),飞行可靠性得到大大提升。
- 机身重量减轻:由于各个电机距离机身较近,电源延长线的重量减少了许多,且布线变得相对简单容易。
- 可控性增强:尾翼在尾电机后,因此在刚刚切换为固定翼模式时尾翼对于飞机姿态的调整作用明显,增加了飞机的可控性。
- 携带方便:航模可拆解,便携性大大增加。
但是这种布局也让我产生了一个疑问:这种双尾撑布局的尾电机会放置在机身以及水平尾翼之间,平飞时这个电机会不会产生很大的乱流,甚至干扰到水平尾翼导致失控呢?于是带着这个问题,我对飞行器进行建模,并将其放入流体力学模拟软件Xflow中进行模拟。
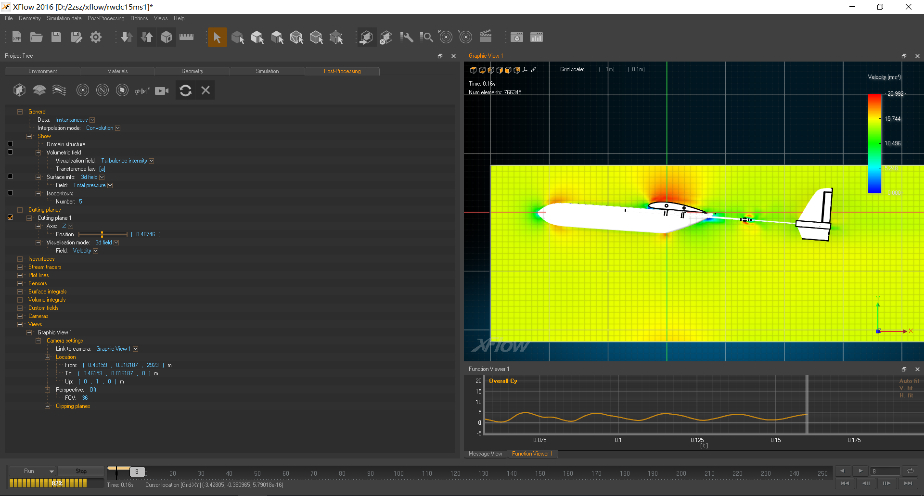
模拟结果如上图所示:尾电机并不会对整架飞机产生很大的干扰,而且只要将其与水平尾翼保持一定距离,就可以防止干扰尾翼。
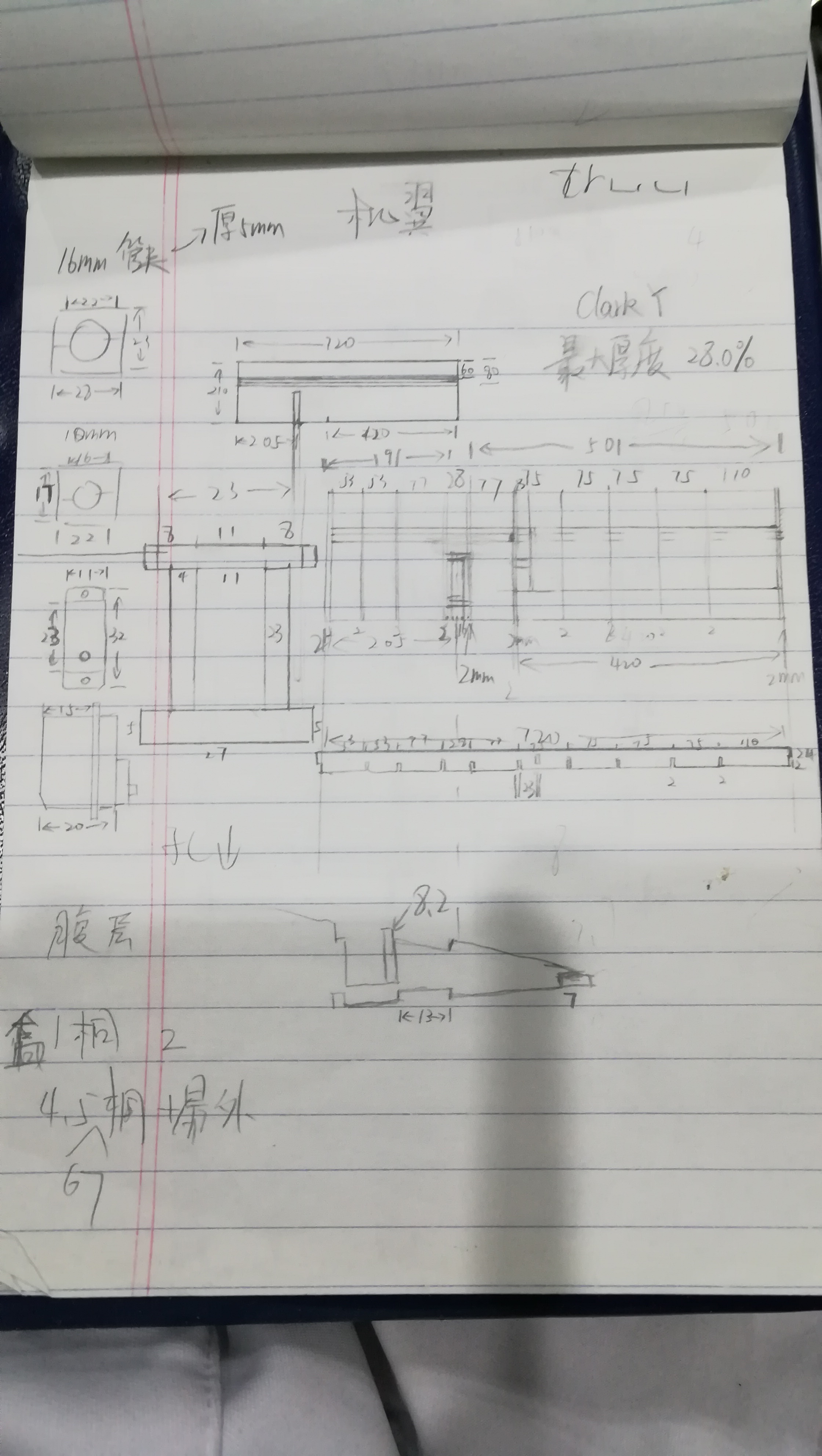
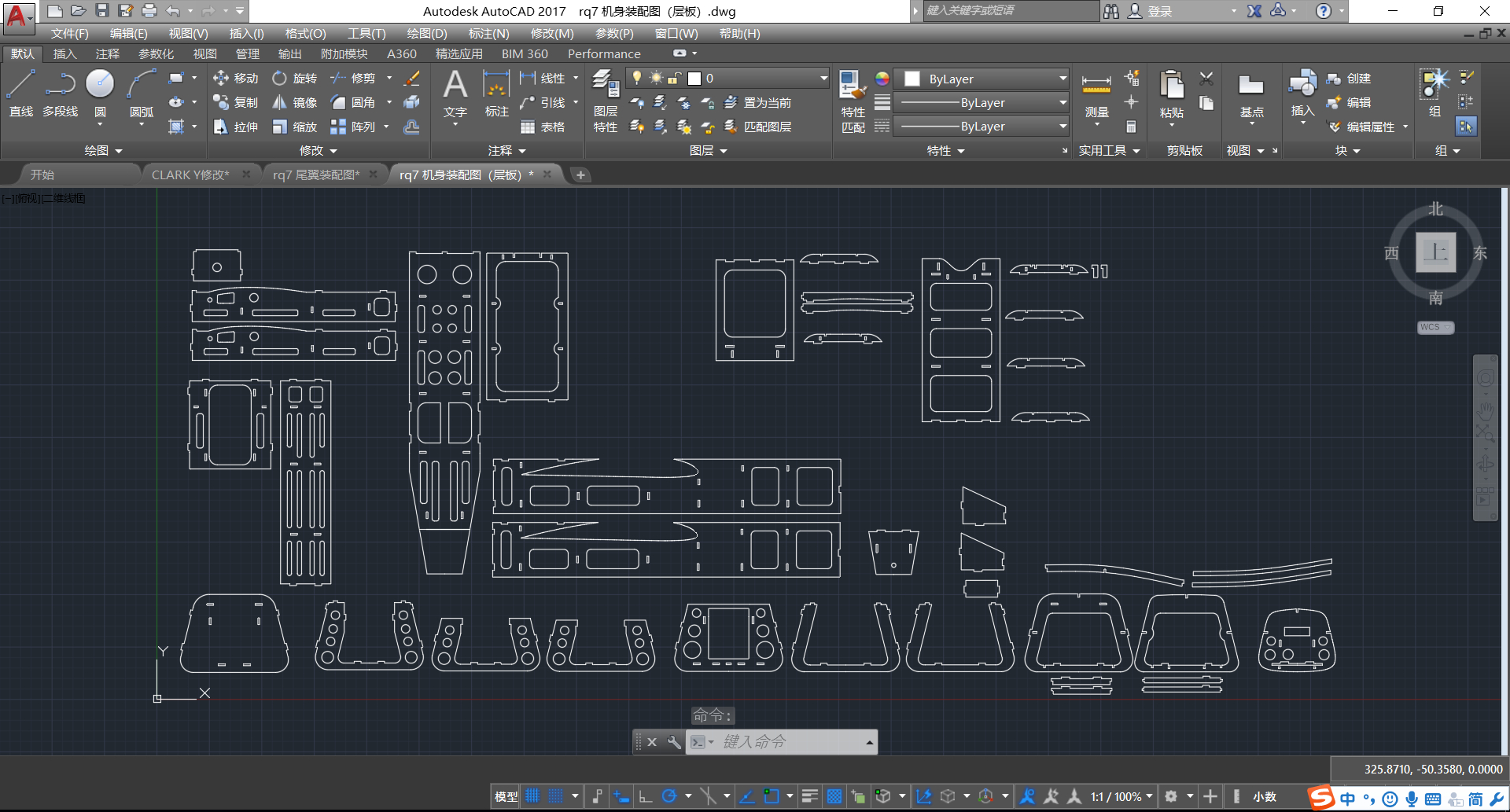
由于对轻木飞行器的改装较为简单,于是这架改进型飞行器我准备采用轻木结构。经过上网查阅资料以及对于AutoCAD更深一步的学习,我使用了一个寒假的时间通过手绘草图、AutoCAD绘制图纸、SolidWorks建模验证契合度这几个步骤,自己绘制出了一份翼展1.5m的双尾撑布局倾转轻木机图纸,并在开学以后使用学校的3D打印机切割,进行制作。由于飞行器尺寸以及重量的增加,这架飞行器使用了可以提供更强大动力的X2814电机以及9寸桨。




制作以及调试完成后,再次进行试飞,这次试飞非常成功,飞行器动力充足,在多轴模式的稳定性大大增强,整个飞行过程非常完美,达到了设计要求。

其他改进点
考虑加装起落架,使得在固定翼模式时降落,螺旋桨不会触碰地面,以便飞机可以在固定翼模式下安全起飞和降落。
作用:飞机可以在大负载时选择使用效率更高的固定翼模式起飞,在小负载时选择更方便的多轴模式起飞,进一步提升了飞机的适用性;而且若发生像试飞中的电机故障问题时可以选择固定翼模式降落,安全性大大提升。
虑增加电机控制程序,在平飞模式时可以选择前拉+尾推、双前拉或者单尾推模式。使飞机在固定翼模式飞行时可以选择工作电机的数量。
作用:飞机可以根据当前执行的任务以及负载选择启用电机数量,若在执行负载小的航测任务,可以选择单尾推或者双前拉模式,以节省电量增加续航时间,进一步提升了飞机的实用性。
改进型飞行器虽然设计了可拆卸结构,但是结构连接主要使用螺丝以及爪牙螺母,这种结构拆卸安装还是较为麻烦。考虑使用榫卯结构以及铆钉固定,并对于拼插结构再做更加深入的研究,使得结构更加可靠、人性化。
创新点
本研究的创新点主要为:
- 融合了多轴的垂直起降与固定翼的平飞模式,提高了动力利用效率,降低了对于起飞及着陆场地的要求,实用性大大提升。
- 垂直起降时采用三轴布局,不需要像“鱼鹰”一样的变桨距控制,结构复杂性大大降低,提升了可靠性。
- 采用了电机倾转结构,倾转时机翼的其他结构保持不变,保证了结构强度,且机翼上的电机距离机翼根部较近,可避免在多轴模式降落时因落地过重导致机翼断裂。
- 根据改进1和改进2,飞机的适用性和实用性大大增强,可以执行各种任务,在商业应用方面优势明显。
参考文献
[1] 刘晨. 双涵道风扇垂直起降飞行器的设计与实现[Z]
[2] 李建波,高正. 涵道风扇空气动力学特性分析[J]. 南京航空航天大学学报,2005,37(6): 680-684.
[3]赵超. 单悬翼涵道风扇式无人直升机建模与控制研究[D]. 南京:南京航空航天大学 2010
此课题获奖记录
| 获奖日期 | 奖项名称 | 奖项等级 |
|---|---|---|
| 2018-11-04 | 第18届“明天小小科学家”奖励活动 二等奖 | 全国级 |
| 2018-03-26 | 第38届北京市青少年科技创新大赛 二等奖 | 市级 |
| 2018-03-26 | 2018年Intel ISEF联席赛事耶鲁科技协会奖 | 国际级 |
| 2018-01-15 | 第13届中国青少年科学院“小院士”课题研究成果展示交流活动一等课题 | 全国级 |
鸣谢
北京市第三十五中学
北京市第三十五中学航空实验室、风洞实验室
指导教师:杨钦贞
- 微信
- 支付宝